2. Arquitetura CAN:
2.1. Topologia da rede
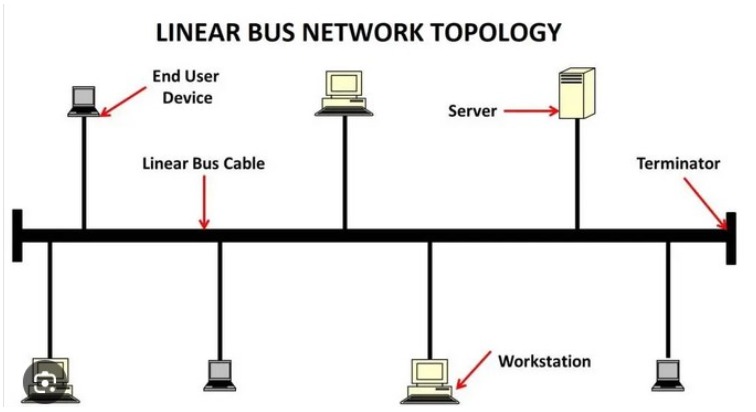
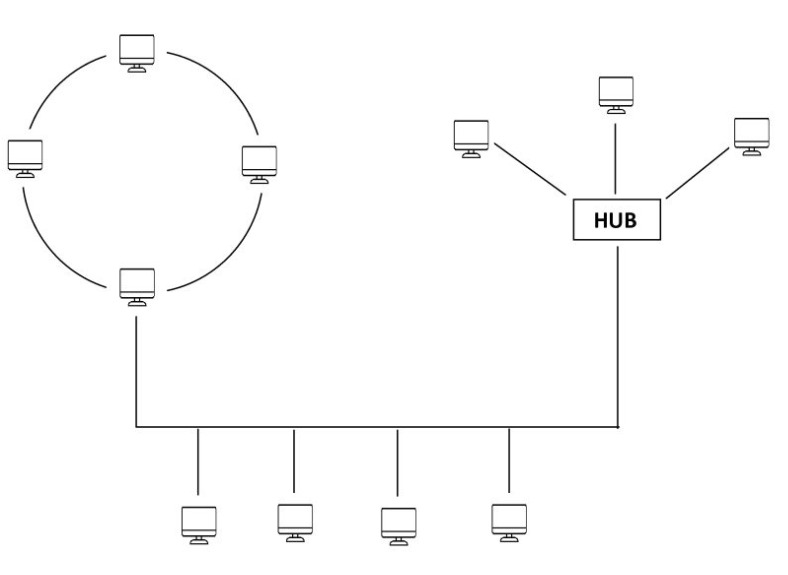
Topologia linear: Todos os nós CAN são conectados a um barramento principal. É adequada para redes de pequeno a médio porte com número limitado de nós. Apresenta baixo custo e fácil manutenção.
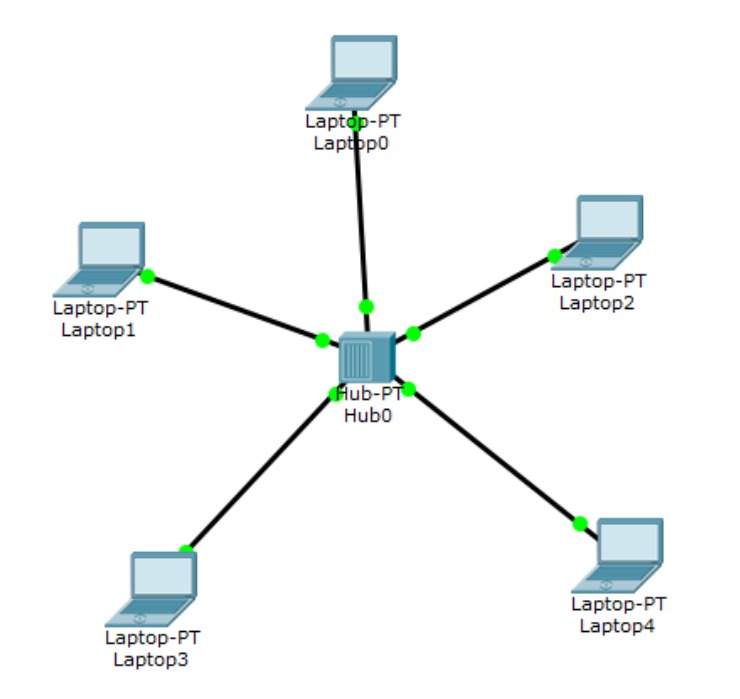
Topologia em estrela: Todos os nós CAN são conectados a um hub central. Cada nó se conecta ao hub, mas não diretamente a outros nós. Fornece melhor gerenciamento e isolamento da rede. Utilizada em redes CAN maiores para reduzir atrasos de comunicação.
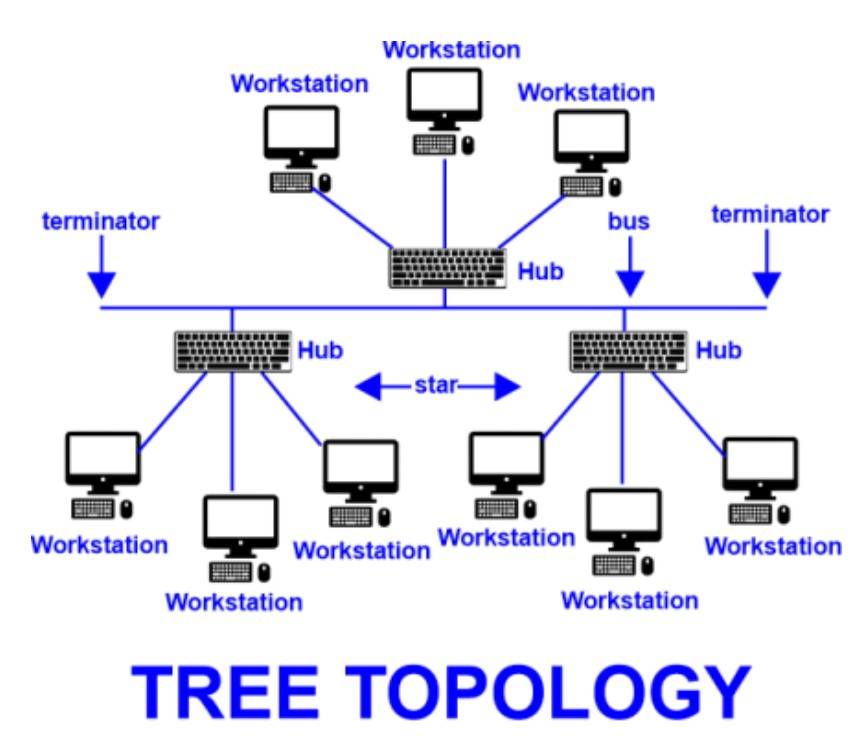
Topologia em árvore: Combina a topologia linear e em estrela. Permite a criação de sub-redes com topologias lineares ou em estrela, conectadas por um ou mais hubs. Adequada para redes CAN grandes e complexas, oferecendo maior flexibilidade.
Topologia híbrida: Combina diferentes topologias (linear, estrela, árvore, etc.) para atender necessidades específicas de comunicação. Permite customização da rede para obter o melhor desempenho.
2.2. Componentes do Sistema
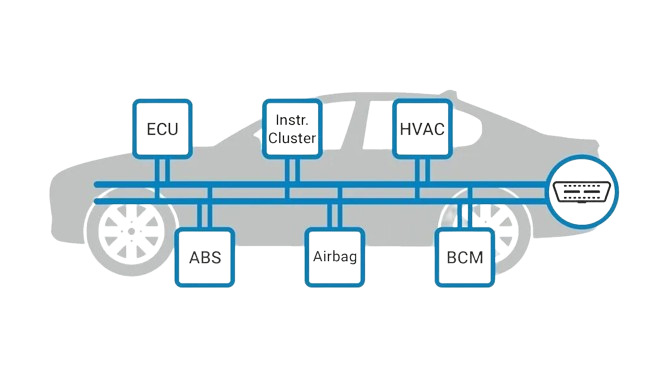
Unidades de Controle: Responsáveis por enviar e receber mensagens pela rede CAN. Podem ser diversos componentes do veículo, como o motor, transmissão, freios, airbags, entre outros. Cada unidade de controle é capaz de enviar mensagens para o barramento e receber mensagens de outras unidades, permitindo uma comunicação eficiente e flexível.
Barramento de Comunicação de Dois Fios: Utilizado para transmitir
dados e mensagens entre os diferentes componentes do veículo. É uma
característica distintiva da rede CAN, permitindo a comunicação em tempo
real e em alta velocidade.
Protocolo de Comunicação: O CAN
utiliza um protocolo robusto e confiável para garantir a integridade e
segurança dos dados transmitidos. Suporta detecção e correção de erros,
garantindo uma transmissão confiável mesmo em ambientes com
interferências elétricas ou ruídos.
2.3. Estrutura de mensagens CAN
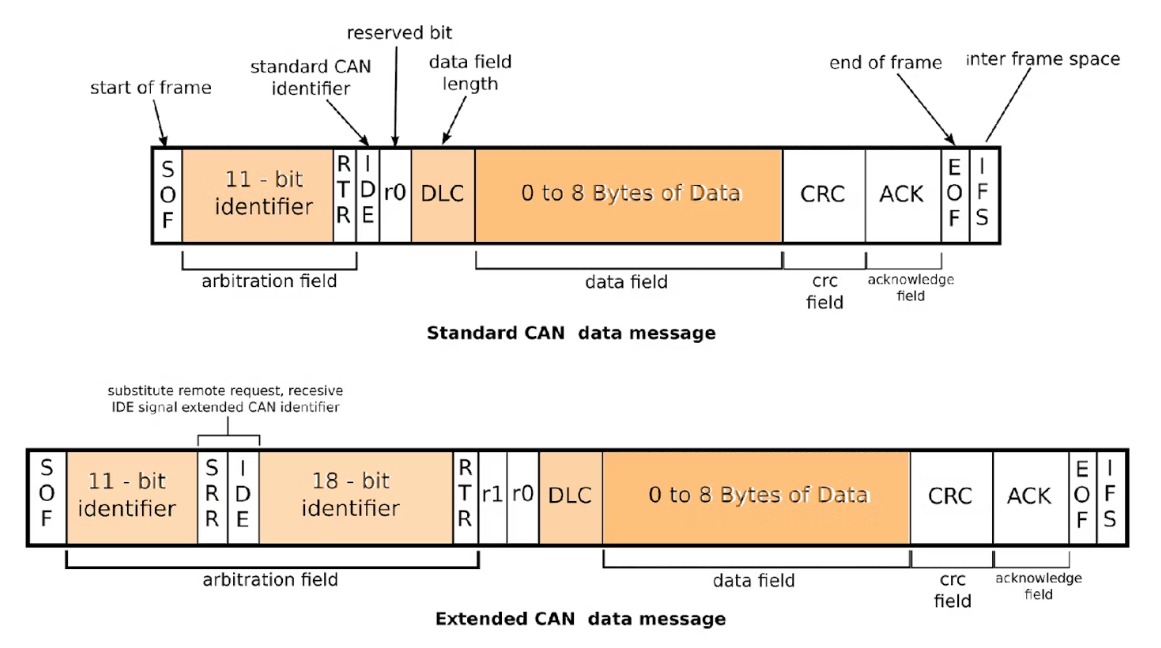
Bit de Início de Quadro (SOF - Start of Frame): O único início de quadro dominante. Este bit marca o início de uma mensagem. Ele sincroniza os nós após um período ocioso.
Identificador (Arbitration Field): O campo de dados do identificador CAN de 11 bits define a prioridade da mensagem. Valores mais baixos significam prioridades mais altas.
RTR (Remote Transmission Request): Solicitação de transmissão remota. Este bit é dominante quando a informação é solicitada por outro nó. Todos os nós receberão a solicitação, mas o identificador determina o nó desejado.
- Quando o bit RTR é dominante (0), indica que se trata de um quadro de dados, contendo informações a serem transmitidas.
- Quando o bit RTR é recessivo (1), indica que se trata de um quadro remoto (Remote Frame), em que um nó receptor solicita que outro nó transmita os dados correspondentes.
IDE (Identifier Extension): O bit de extensão do identificador indica que um identificador CAN padrão (não estendido) está sendo transmitido.
R0: Reservado para uso futuro.
DLC (Data Link Connector): O código de comprimento de dados contém o número de bytes na transmissão.
Data (Campo de Dados): Os dados reais que estão sendo transmitidos.
Soma de verificação (CRC): A verificação de redundância cíclica (CRC) de 16 bits (15 bits mais delimitador) contém a soma de verificação (número de bits transmitidos) dos dados de aplicação anteriores para transmissão de detecção de erros.
Bit de Reconhecimento (ACK): Quando um nó recebe uma mensagem com sucesso, ele a reconhece substituindo este bit por um bit dominante. Por outro lado, se um nó encontrar um erro numa mensagem, ele permite que esse bit permaneça recessivo e ignore a mensagem. O slot ACK e o delimitador ACK têm, cada um, um bit de comprimento.
EOF (End of Frame): É um campo de 7 bits que indica o final de cada quadro CAN (mensagem).
IFS (Inter Frame Space): É o tempo que o controlador precisa para mover um quadro (mensagem) para a posição na área do buffer. Observe que o IFS contém um mínimo de três bits recessivos (1) consecutivos. Após a passagem de três bits recessivos, quando um bit dominante é detectado, ele se torna o bit SOF do próximo quadro.