5. Implementação
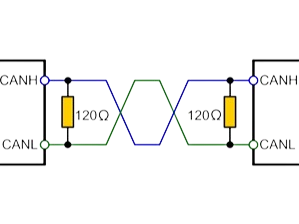
5.1. Como configurar uma rede CAN
Controladores CAN: Os controladores CAN são utilizados em conjunto com microcontroladores e transceptores para criar uma rede CAN. Eles são responsáveis por gerenciar a transmissão e recepção de mensagens, além de implementar a camada de enlace e a camada física do protocolo.
Existem dois tipos principais de controladores CAN:
- Controlador CAN Discreto: Conectado ao microcontrolador através dos barramentos de dados e endereços. Ele é útil quando se pretende atualizar sistemas já existentes.
- Microcontrolador com Controlador CAN Interno: Nesse caso, o controlador CAN é integrado ao microcontrolador, o que torna mais fácil a implementação da rede. Isso é comum em aplicações que requerem velocidades reduzidas, pois permite uma configuração mais econômica.
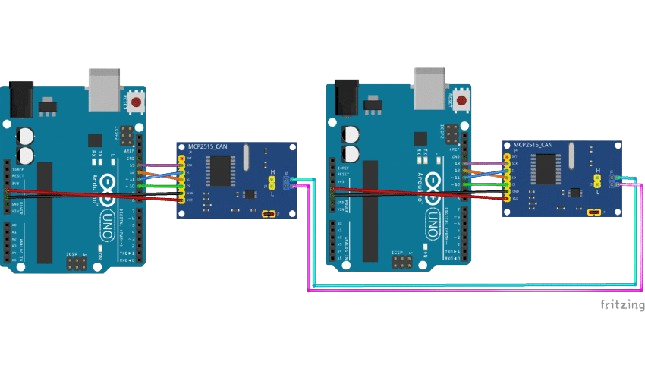
5.2. Programação de controladores CAN
NI-XNET:
É um protocolo de rede que suporta o protocolo CAN, sendo amplamente utilizado em aplicações de automação industrial, testes de hardware e software, e outras áreas que requerem um tipo de comunicação confiável e em tempo real. Além disso, o NI-XNET fornece interfaces avançadas para CAN com unidades de processamento integradas, garantindo a precisão da temporização do barramento CAN.