
 Início
Início
4. Protocolos
Para ocorrer a troca de dados entre os sensores se torna necessária a definiçăo de uma forma de comunicaçăo entre os nós. Para isso se usam diferentes padrőes de comunicaçăo implementados na forma de protocolos que podem atuar na camada física ou de enlace. Dentre as possibilidades se destacam o uso dos seguintes protocolos.
4.1. Wi-Fi (IEEE 802.11):
O padrăo 802.11 surgiu no IEEE devido a necessidade padronizar as comunicaçőes sem fio. Inicialmente tentou se usar protocolos usados no ambiente com fio para esta finalidade, por exemplo o 802.3 (Ethernet). No entanto este apresentou problemas que inviabilizavam seu uso para este meio. O padrăo 802.11 supriu estas demandas com soluçőes na camada física (PHY) e na camada de médio acesso(MAC).
Este protocolo é amplamente utilizado o que gerou várias versőes aprimoradas, entre elas:
 802.11a: frequęncia de operaçăo de 5,8GHz; velocidade máxima de 54Mbps (dentro dos padrőes IEEE) e até 64 utilizadores por ponto de acesso.
802.11a: frequęncia de operaçăo de 5,8GHz; velocidade máxima de 54Mbps (dentro dos padrőes IEEE) e até 64 utilizadores por ponto de acesso.
802.11b: frequęncia de operaçăo de 2,4GHz; taxa de transmissăo máxima de 11Mbps (no padrăo IEEE) e até 32 utilizadores por ponto de acesso.
802.11g: frequęncia de operaçăo de 2,4GHz; velocidade de transmissăo de 54Mbps.
802.11n: frequęncias de operaçăo 2,4 e/ou 5GHz; taxas de transferęncia de 65Mbps a 300Mbps.
No entanto as soluçőes citadas fizeram com que os frames necessitassem de faixas de frequęncias largas e muita energia pra transmitir. Isto faz com que o Wi-Fi năo seja tecnologia mais recomendada para o uso em redes de sensores sem fios quando comparada ŕs outras opçőes.
4.2. Bluetooth:
A tecnologia Bluetooth foi desenvolvida pela Ericsson mas hoje em dia é comum em vários equipamentos eletrônicos de diversas companhias. Este tipo de comunicaçăo utiliza frequęncias entre 2,4 e 2,485GHz, dentro da faixa ISM (industrial, scientific and medical), operam em curto alcance com taxa de transferęncia de até 24Mbps. Os dispositivos que usam esta forma de comunicaçăo se organizam com relaçőes mestre-escravo sendo que cada dispositivo mestre determina uma piconet que pode ter no máximo 7 dispositivos escravos. Além disso, dispositivos mestre podem se comunicar entre si estendendo a rede, sendo que estas, quando expandidas, recebem a denominaçăo de scatternets.
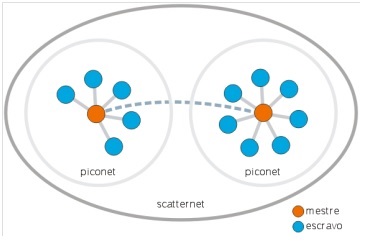
Figura 4.1 - Duas piconets formando uma scatternet, retirada de [13].
Para garantir o correto endereçamento da mensagens cada equipamento é produzido com um código identificador pelo fabricante. Ao ser ligado, um equipamento que funcionará como mestre rastreia os equipamentos que săo capazes de responder e estes trocam seus endereços. Assim passa a existir uma conexăo de exclusividade, năo permitindo que o dispositivo escravo seja acessado por outro possível mestre e endereçando corretamente as informaçőes passadas pelo mestre. Dentro de uma piconet os dispositivos continuamente trocam as frequęncias utilizadas dentro da faixa disponível. Este mecanismo, chamado de frequency hopping, visa evitar interferęncias e possibilita a coexistęncia de diversos dispositivos e é definido por um algoritmo da especificaçăo do bluetooth. Isto define a organizaçăo dos links entre escravos e mestre dentro de uma piconet no nível da camada física de forma que os dados săo trocados em pacotes em ambos os sentidos nestes canais de frequęncia definidos.
Os protocolos desta tecnologia estăo organizados em uma pilha dividida em tręs grupos lógicos nas camadas intermediárias com diferenças em relaçăo ao modelo OSI [13]. O grupo de protocolos de transporte săo responsáveis por funçőes típicas da camada física e de enlace do modelo OSI, assim este grupo de protocolos săo responsáveis pela localizaçăo de outros dispositivos bluetooth e gerenciamentos de suas ligaçőes. Neste grupo se encontram as camadas de rádio frequęncia (RF), Baseband, Link Manager, Logical Link Control and Adaptation (L2CAP).
O segundo grupo da pilha é o de protocolos de middleware. Este grupo de protocolo serve como interface para outros padrőes industriais permitindo-lhes que operem sobre os links e protocolos de transporte destas redes.
O último grupo, o de aplicaçăo, consiste no uso em si das ligaçőes da rede em suas aplicaçőes podendo estas serem específicas ou năo para a tecnologia bluetooth.
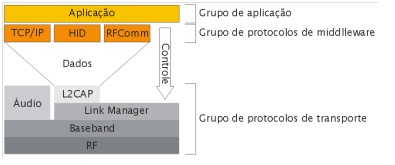
Figura 4.2 - Disposiçăo da camada de protocolo e seus usos.
A tecnologia bluetooth necessita de um hardware como no mínimo seis componentes de hardware, dos quais dois săo responsáveis pelo gerenciamento dos protocolos, Host Controller e Link Control Processor, e quatro pela geraçăo da ondas de rádio em si.
No entanto o consumo de energia dos dispositivos em espera relativamente alto e, consequentemente, a pequena vida útil das bateria nesta aplicaçăo, săo características que tornam esta tecnologia pouco competitiva em relaçăo a utilizaçăo em redes de sensores sem fio de maior extensăo.
4.3. Z-Wave:
Z-Wave é uma tecnologia proprietária que vem sendo usada no âmbito da domótica. Esta área demanda vasta utilizaçăo de sensores para obter as informaçőes sobre o ambiente doméstico e automatizá-lo. Apesar de ser uma tecnologia considerada tendęncia para sua área de aplicaçăo, ainda possui altos custos, sendo pouco utilizada.
4.4. ZigBee (IEEE802.15.4):
Este tipo de protocolo apresenta dois tipos de dispositivos, os completamente funcionais e os de funcionalidade reduzida. Os completamente funcionais podem desempenhar qualquer das funçőes dentro da rede, podendo ser usados como coordenadores, sensores ou ainda como roteadores. Enquanto os de funçőes reduzida nas redes de sensores sem fio podem operar apenas como sensores apenas enviando dados, ou seja, como pontas das redes.
Esta tecnologia permite a construçăo de redes de dois tipos, em estrela ou ponto a ponto.
Na configuraçăo em estrela o sistema é centralizado, um dispositivo chamado de coordenador chamado de PAN controla os demais. Existe a possibilidade da alimentaçăo do PAN ser contínua enquanto a dos demais dispositivos ser feita por baterias. Essa topologia normalmente este tipo de arranjo é utilizado em aplicaçőes médicas e em automaçăo residencial. Assim um dispositivo de funcionalidade completa pode desempenhar a funçăo de PAN permitindo que outros dispositivos se liguem a ele. Assim cada dispositivo com o mesmo padrăo de comunicaçăo que é inicializado dentro do alcance de um controlador PAN pode se ligar a este passando a ter um endereço único de até 64 bits e se torna dedicado, ou seja năo podendo mais ser acessado por outra rede. Desta forma cada rede estrela pode operar de forma independente dentro de uma mesma regiăo.

Figura 4.3 - Topologia estrela, retirada de [4]
Na Figura 3 săo representados dispositivos em uma topologia estrela na qual o círculo verde representa um dispositivo de funcionalidade completa agindo como Coordenador PAN e os azuis dispositivos de funcionalidade reduzida que devem atuar como sensores em uma RSSF.
As configuraçőes ponto a ponto se diferem da estrela principalmente em relaçăo a exclusividade das ligaçőes. Nessa topologia os dispositivos de funcionalidade completa podem se comunicar com seus pares dentro de seu alcance podendo operar como roteadores. Isto permite redes mais complexas que podem apresentar a formaçăo em malha ou em árvore. Nas redes em malha boa parte dos dispositivos săo de funcionalidade completa e funcionam como roteadores permitindo que se formem 'ramos'.
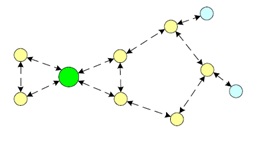
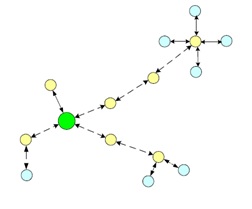
Figura 4.4 - (esquerda) Rede em malha simples, retirada de [4]
Figura 4.5 - (direita) Rede em árvore, retirada de [4]
Tais redes, devido a sua maior versatilidade e capacidade de enviar as mensagens de um ponto do ramo para o PAN, tem sido mais usadas em áreas como controle industrial e monitoramento agrário.
A configuraçăo destas redes săo implementadas principalmente nas camada física e de enlace, principalmente na subcamada de acesso a camada física, MAC. A primeira define os canais de transmissăo de dados, a ativaçăo e desativaçăo dos transceptores e é responsável pré organizaçăo dos pacotes de dados. Já a subcamada MAC permite o acesso das informaçőes por outros protocolos IEEE de camadas superiores. No entanto a ZigBee Aliance define camadas de rede e de suporte a aplicaçăo, além citadas anteriormente que săo padronizadas pelo IEEE802.15.4. A camada de rede é responsável pela organizaçăo dos dispositivos e de suas funçőes na configuraçăo na qual a rede está operando além das rotas das mensagens dentro malha de comunicaçăo.
A camada física define frequęncias que năo necessitam de licenciamento 2.4GHz, 869 e 915MHz. Nestas frequęncias existe canais para transmissăo de dados a 250Kbps para a de maior frequęncia, de 40Kbps para a frequęncia de 915MHz e de 20Kbps para a de menor frequęncia. Uma das vantagens desta configuraçăo é a baixa taxa de erros inerentes a suas modulaçőes. A camada física ainda organiza os dados pelo PPDU (PHY Protocol Data Unit) que consiste em um cabeçalho de sincronizaçăo, que inclui o preâmbulo, um cabeçalho para a camada física, que dita o tamanho do quadro, e um cabeçalho de unidade de serviço de dados.
Na configuraçăo ponto a ponto, mais complexa, se apresentam 3 tipos de comunicaçăo entre os dispositivos. Transmissăo de dados para o coordenador, transmissăo do coordenador para um dispositivo e transferęncia de dispositivo para dispositivo. A configuraçăo estrela é um caso em particular. Para o funcionamento destes tręs tipos de comunicaçăo é necessária a subcamada MAC que as organiza gerando os canais de sincronizaçăo, implementa a associaçăo e dissociaçăo dos dispositivos na rede e, ainda, gerencia o tempo de acesso ao canal de cada dispositivo.
A composiçăo destas camadas pode ser abstraída de forma simplificada como uma máquina de estados dos dispositivo da rede que é mostrada a baixo. Os dispositivos ficam no estado 0 até receber um pacote para seu endereço. Quando isto acontece o dispositivo verifica se é um enquire ou um pacote de dados, caso seja um enquire vai para o estado 1, no caso de haver dados para serem enviados. Uma vez no estado 1 o dispositivo envia um NACK e volta para o estado 0. No estado 2 envia um ACK para o remetente da mensagem e passa para o estado 3. No estado 3 envia ou recebe a mensagem, se o tempo expirar volta para o estado 0, caso seja bem sucedida vai para o estado 4. No estado 4 ele aguarda um ACK do destinatário.
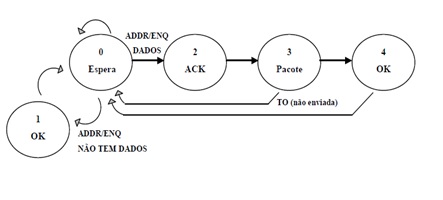
Figura 4.6 - Máquina de estados ZigBee, retirada de [17]
Concluindo, devido ao baixo consumo de energia e custo e melhor escalabilidade em relaçăo as demais possibilidades, a tecnologia ZigBee vem sendo a mais empregada no desenvolvimento de redes sem fio. Apesar da baixa potęncia as comunicaçőes entre duas unidades podem ser replicadas até atingir um destino final específico.